Как сделать самодельный кран в кузов грузовика своими руками
Содержание:
- Как работает простая конструкция блоков
- Шаг 9. Подготовка контроллера Nunchuk
- Использование КМУ с люлькой
- Отделка и сборка
- Электроника
- Особенности манипулятора
- Шаг 11 Настройка Arduino IDE
- Шаг 12. Код Arduino
- Основные характеристики
- Как сделать и установить самому
- Сборка в общих чертах
- Какие меры безопасности должны соблюдаться при выполнении работ по установке КМУ?
- Шаг 10. Схема подключения
- Сборка конструкции
Как работает простая конструкция блоков
Система блоков или полиспаст известна человечеству с древнейших времён. Классическая конструкция системы состоит из шкивов и троса. Один шкив называют блоком. В зависимости от способа крепления шкив может быть подвижным и неподвижным:
- Неподвижный блок. Крепится к опоре и играет роль изменения направления движения каната. Не даёт никакого выигрыша в силе.
- Подвижный блок. Располагается на стороне груза и даёт выигрыш в силе.
Принцип работы полиспаста схож с принципом работы рычага в физике простых механизмов. Роль рычага в этом случае играет сам трос. В случае простого блока из двух шкивов, подвижный шкив делит верёвку на 2 части и для того, чтобы поднять груз на то же расстояние, потребуется канат в 2 раза длиннее. Работа по поднятию груза выполняется в том же объёме. А усилие, из-за того, что длина верёвки стала в два раза больше, становится в два раза меньше.
В случае если в системе более 2-х шкивов, выигрыш в силе примерно равен количеству блоков. В случае 3-х блоков, усилие будет в 3 раза меньше, а 4 блока потребуют лишь четверть от первоначального усилия.
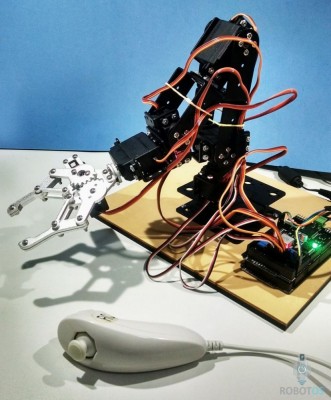
Шаг 9. Подготовка контроллера Nunchuk


Для этого проекта мы решили использовать контроллер Nintendo Nunchuk по ряду причин:
- Они дешевые! Реплики могут иметь низкое качество, но нам не нужен надежный контроллер для этого проекта;
- Их легко найти! В Интернете есть несколько оригинальных и недорогих реплик.
- В нем много датчиков! Каждый контроллер имеет две кнопки (кнопки Z и C), двухосный джойстик (X и Y) и трехосный акселерометр;
- Для него есть библиотека на Arduino. Роберт Эйзеле разработал удивительную и удобную библиотеку для чтения сенсора Nunchuk. Доступный: https://www.xarg.org/2016/12/using-a-wii-nunchuk-with-arduino/
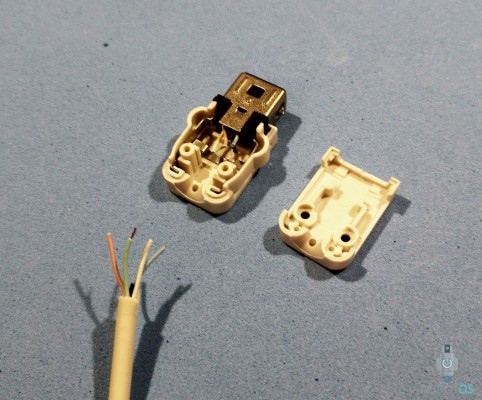
К несчастью, джойстики Nunchuk имеют неудобный разъем, который трудно соединить с другой электроникой. Чтобы подключить его к Arduino, нам пришлось разрезать кабель и разделить провода. Таким образом, он больше не будет работать с Nintendo Wii …: /
Сначала нам пришлось отрезать разъем джойстика и снять изоляцию провода. Используя мультиметр и исходя из цвета каждого провода, я определил функцию каждого провода (Vcc, GND, SCL и SDA) на основе схемы разъема, показанного на рисунке. Цвет проводов не имеет определённого стандарта. Мы уже сталкивались со следующими конфигурациями:
Оригинал:
- SDA = зеленый
- SCL = желтый
- 3V3 = красный
- GND = белый
Реплика 1:
- SDA = желтый
- SCL = белый
- 3V3 = зеленый
- GND = красный
Реплика 2:
- SDA = blue
- SCL = white
- 3V3 = pink
- GND = green
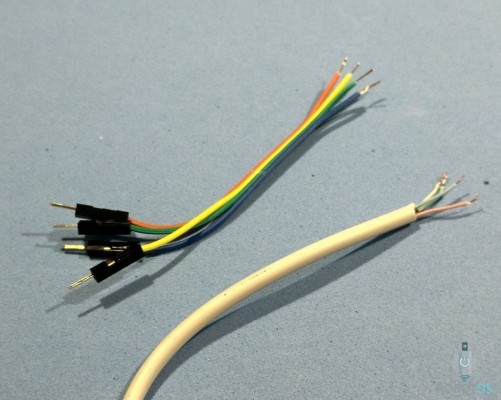
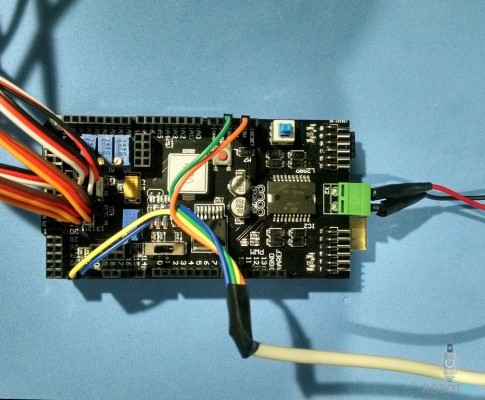
Мы припаяли провода к перемычке (папа), чтобы легче было подключиться к плате Arduino. Для этого использовали паяльник и термоусадочную трубку, как показано на рисунках.
Позднее нам сообщили, что есть адаптер Nunchuk, который упрощает подключение к плате ( WiiChuck Nunchuck Adapter shield Module Board For Arduino). Это хороший вариант, если Вы хотите, сэкономить время на пайке и не хотите разрушать оригинальный разъем.
Использование КМУ с люлькой
Стационарный кран, оснащенный люлькой, работает только от электричества, поставляемого стационарной сетью. При этом он использует электропитание только в части операций, таких как подъем, опускание и поворот стрелы манипулятора влево или вправо. Учитывая, что при этом не требуется демонтировать подъемный крюк, возможности механизма существенно расширяются.
Если более подробно рассматривать область применения этого подъемного механизма, то он является незаменимым на ограниченных пространствах, таких как строительная площадка в городских условиях. Обычный строительный кран не всегда может беспрепятственно доставить людей и материалы на крышу дома, тогда как манипулятор с площадкой способен довольно быстро справиться с этой задачей. Например, для переноски рубероида на крышу жилого дома рабочим придется потратить достаточно много времени и сил, тогда как при помощи КМУ эту работу можно выполнить буквально за несколько минут.
Отделка и сборка
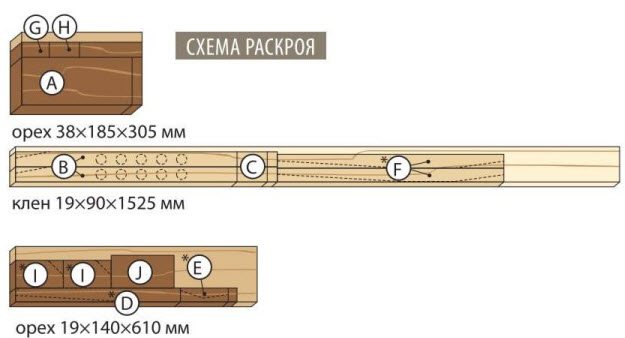
1. Снимите поворотную опору, мачту В/С и боковины I с платформы лебедки J. Осмотрите все детали и, если требуется, дополнительно их отшлифуйте. Наденьте колеса и бадью на 6-миллиметровый стержень и подложите под его концы толстые обрезки. Чтобы нанести отделочное покрытие на деревянные оси, не затрагивая их концы, которые будут вклеиваться в отверстия, возьмите обрезок толстого бруска и, просверлив в нем восемь 10-миллиметровых отверстий, вставьте в них оси. Затем сделайте шесть 6-миллиметровых отверстий с интервалом не менее 50 мм в другом обрезке. Вставьте в четыре из них короткие шканты и насадите на их концы ручки-кнопки. Оберните малярным скотчем один конец каждого стержня с катушкой, а вторые концы вставьте в оставшиеся отверстия обрезка. Нанесите бесцветное покрытие на все детали игрушки. (Мы использовали полуматовый лак в аэрозольном баллоне, который наносили четыре раза с промежуточной шлифовкой наждачной бумагой № 320. Колеса после просушки каждого слоя обрабатывали мягкой щеткой из латунной проволоки.)
2. Наденьте на каждую ось колесо и шайбу. Вклейте оси в отверстия шассиА, вставляя между колесом и шайбой тонкую пластиковую прокладку, чтобы колеса могли свободно вращаться. 3. Шурупами прикрепите к платформе лебедки J одну из боковин I (рис.5). Наденьте на каждый стержень с катушкой шайбу, пружину и еще одну шайбу, вставьте их в отверстия боковины лебедки. Добавьте еще две шайбы с пружиной на каждый стержень и установите вторую боковину лебедки, чтобы стержни с катушками оказались между двумя боковинами. Наденьте еще по одной шайбе на выступающие снаружи концы стержней и насадите ручки-кнопки, смазав их отверстия клеем.
4. Прикрепите к платформе лебедки мачту В/С. Подготовьте два отрезка резьбовой шпильки М6 длиной 92 мм (на 10 мм больше ширины основания) и проденьте их сквозь отверстия боковин I и мачты (рис. 5). Нанесите на концы шпилек немного специальной пасты-фиксатора и наверните колпачковые гайки. Прикрепите поворотную опору шурупами к платформе J лебедки, а затем к шасси А.
5. Теперь возьмите еще два отрезка резьбовой шпильки длиной 67 и 29 мм. Вставьте стрелу D/E/F/H между боковыми деталями мачты В. Проденьте длинный отрезок шпильки в осевые отверстия (рис. 1). Нанесите пасту-фиксатор и наверните колпачковые гайки. Короткий отрезок вставьте в отверстия на переднем конце стрелы и также закрепите его с помощью колпачковых гаек, нанеся пасту-фиксатор.
6. Отрежьте шнур длиной 61 см и завяжите на одном его конце узел. Проденьте его сверху через отверстие в задней проставке стрелы Е, затем через отверстие в задней катушке и завяжите второй узел. Лишнюю часть шнура намотайте на катушку, вращая ручки-кнопки.
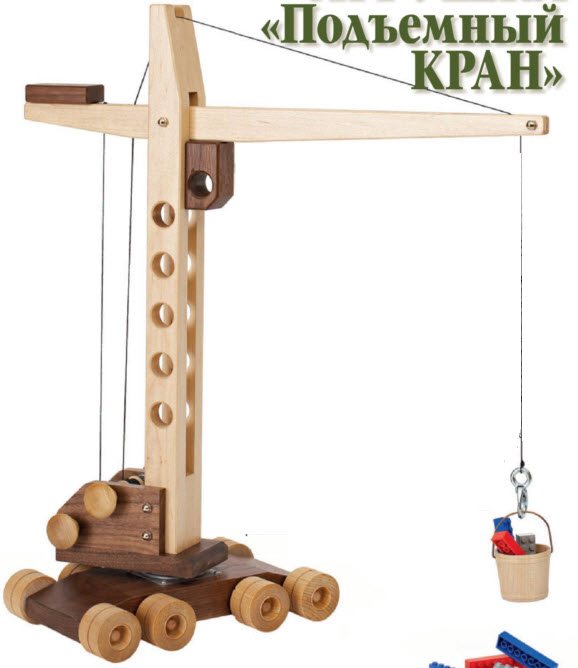
7. Отрежьте шнур длиной 183 см, проденьте его в отверстие передней катушки и завяжите узел. Затем проведите шнур в просвет между передней и задней проставками стрелы D, Е, через верхнюю проставку мачты С и между передней проставкой и передней резьбовой шпилькой. Привяжите к концу шнура грузовой крюк и намотайте свободный излишек шнура на катушку. Наконец, повесьте на крюк небольшую бадью. Не забудьте надеть рукавицы и защитную каску, перед тем как включить двигатель и дать волю воображению!
Игрушка «Подъемный кран», 3.9 out of 5 based on 7 ratings
Электроника
Тут мое повествование тесно сплетается с предыдущими проектами. С некоторых пор я начал и для этих целей даже подготовил свою Arduino-совместимую плату . С другой стороны как-то раз мне подвернулась возможность дешево изготовить платы (о чем я тоже ). В итоге все это закончилось тем, что я использовал для управления манипулятором свою собственную Arduino-совместимую плату и специализированный шилд.

Этот шилд на самом деле очень простой. На нем четыре переменных резистора, две кнопки, пять разъемов для сервопривода и разъем питания. Это очень удобно с точки зрения отладки. Можно загрузить тестовый скетч и записать какой-нибудь макрос для управления или что-нибудь вроде того. Ссылку для скачивания файла платы я тоже дам в конце статьи, но она подготовлена для изготовления с металлизацией отверстий, так что мало пригодна для домашнего производства.

Особенности манипулятора
До появления uArm, настольные манипуляторы подобного класса выглядели достаточно уныло. У них либо не было электроники вообще, либо было какое-нибудь управление с резисторами, либо было свое проприетарное ПО. Во-вторых, они как правило не имели системы параллельных шарниров и сам захват менял свое положение в процессе работы. Если собрать все достоинства моего манипулятора, то получается достаточно длинный список:
- Система тяг, позволяющих разместить мощные я тяжелые двигатели в основании манипулятора, а также удерживающие захват параллельно или перпендикулярно основанию
- Простой набор комплектующих, которые легко купить или вырезать из оргстекла
- Подшипники почти во всех узлах манипулятора
- Простота сборки. Это оказалось действительно сложной задачей. Особенно трудно было продумать процесс сборки основания
- Положение захвата можно менять на 90 градусов
- Открытые исходники и документация. Все подготовлено в доступных форматах. Я дам ссылки для скачивания на 3D-модели, файлы для резки, список материалов, электронику и софт
- Arduino-совместимость. Есть много противников Arduino, но я считаю, что это возможность расширения аудитории. Профессионалы вполне могут написать свой софт на C — это же обычный контроллер от Atmel!
Шаг 11 Настройка Arduino IDE
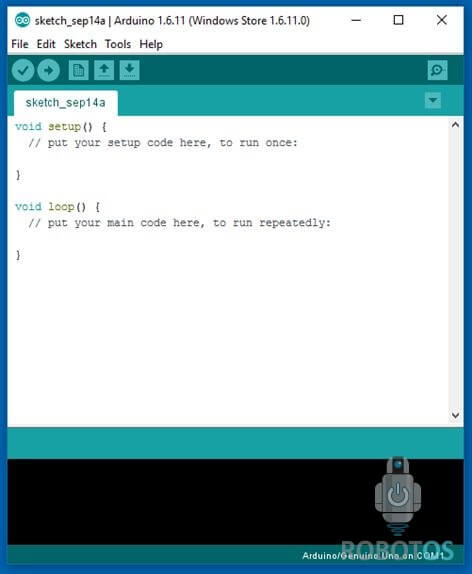
Теперь, когда оборудование готово, пришло время поработать над кодом Arduino.
- Скачайте и установите новую версию Arduino IDE
Вы можете найти последнюю версию для Windows, Linux или MAC OSX на веб-сайте Arduino: https://www.arduino.cc/en/main/software
- Добавление библиотек
Для этого проекта я использовал потрясающую библиотеку Nunchuk Arduino Роберта Эйзеля! Подробнее Вы можете узнать на его сайте:
Скачайте библиотеку — https://github.com/robotoss/Nunchuk
Перейдите в Sketch-> Include Library -> Manage Libraries… на вашей Arduino IDE для добавления библиотеки.
Перейдите в Скетч-> Подключить Библиотеку -> Добавить Библиотеку… на вашей Arduino IDE для добавления библиотеки.
Как работает библиотека?
В библиотеке Nunchuk имеется набор функций для считывания датчиков контроллера:
nunchuk_buttonZ (): возвращает 1, если нажата кнопка Z, или 0, если это не так;
nunchuk_buttonC (): возвращает 1, если нажата кнопка C, или 0, если это не так;
nunchuk_joystickX (): возвращает значение x джойстика (от -127 до 127);
nunchuk_joystickY (): возвращает значение y джойстика (от -127 до 127);
nunchuk_pitch (): возвращает угол контроллера в радианах (от -180º до 180º);
nunchuk_roll (): возвращает угол наклона контроллера в радианах (от -180º до 180º).
Углы возвращаются в радианах. Мы преобразовали эти значения в градусы в коде Arduino.
Шаг 12. Код Arduino



Загрузите скетч файл Arduino.
Подключите USB-кабель к USB-порту вашего компьютера и загрузите код. Загрузка кода занимает время, Вам нужно проявить терпение.
После полной загрузки, отсоедините USB-кабель, подключите источник питания к Arduino и включите кнопку питания. Код начнет работать моментально.
Вам, возможно, придется заменить начальный угол каждого серводвигателя в зависимости от того, как Ваши сервоприводы монтируются.
Объяснение кода:
Перед установкой кода импортируте библиотеки, используемые в эскизе (nunchuk.h, wire.h и servo.h).
Далее определяются используемые контакты и объявляются глобальные переменные. Целочисленные переменные angle# (угла) сохраняют начальную позицию для каждого сервопривода. Если Вы хотите, чтобы Ваш робот начал работать в другой позиции, измените значения этих переменных.
Переменные servo # _speed определяют скорость движения каждого сервопривода. Если вы хотите, чтобы определенный сервопривод двигался быстрее, увеличьте его значение. Угол # min и угол # max используются для ограничения максимального и минимального угла для каждого сервопривода. Вы можете установить эти переменные, чтобы избежать коллизий между последовательными суставами робота.
Во время настройки каждый сервопривод подключается к определенному выводу, и его положение запускается.
Здесь также запускается последовательная связь (с последовательным монитором) и связь I2C с Nunchuck.
Основной цикл повторяется снова и снова. Статус Nunchuk читается в каждом цикле. В зависимости от показаний выполняются разные команды.
Джойстик X будет использоваться для перемещения серво #1.
Был использован следующий блок кода. Сначала он проверяет, достаточно ли значение джойстика. Таким образом, шум и небольшие вариации не учитываются. Если значение соответствует требованиям, угол сервомашины будет увеличен / уменьшен с заданной скоростью.
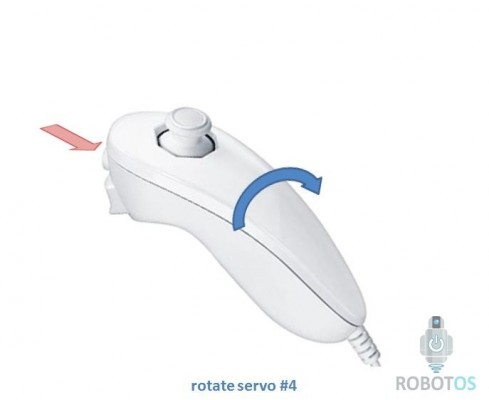
Аналогичный блок используется для джойстика Y. Он используется для изменения угла Серво #3. Серво #2 сохраняется в этом коде.
Вращение захвата задается углы рулона и тангажа контроллера, измеренные его акселерометром. Чтобы облегчить управление рукой, угол захвата обновляется только при нажатии кнопок C или Z.
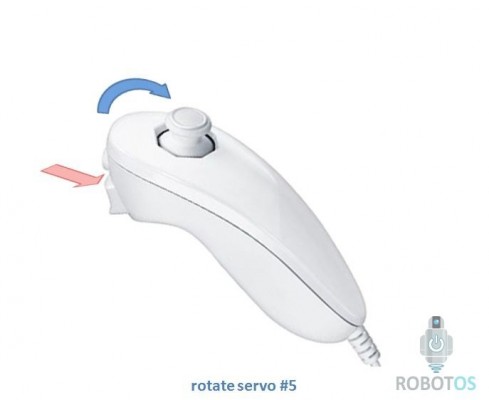
Когда нажимается только кнопка C, код считывает угол поворота и использует его как заданное значение. Серво #5 вращается до достижения заданного значения. Это скорость пропорциональна ошибке между фактическим и желаемым положением. Аналогичный код используется для сервоуправления №4, который отслеживает угол наклона контроллера.
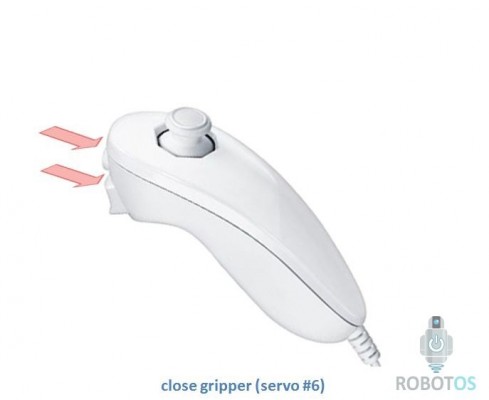
Захват закрывается всякий раз, когда нажимаются кнопки C и Z. Когда какая-либо из этих кнопок будет не нажата, манипулятор откроет захват.
К концу эскиза есть блок кода. Он отобразит на Serial Monitor фактический угол каждого сервомотора. Может быть полезно выбрать начальный угол каждого двигателя.
Основные характеристики
При изготовлении самодельной кран-балки лучше ориентироваться на технические параметры моделей заводского изготовления. Эти характеристики рассчитывались квалифицированными специалистами, поэтому оптимально подойдут для многоцелевого применения.
Характеристики различных модификаций могут отличаться, но в целом, это выглядит так:
- Рабочая зона. Длина пролёта варьируется в пределах 3-28.5 метров. Ориентироваться на этот показатель не стоит: не каждый гараж обладает такой площадью, поэтому длина кранового пути подбирается исходя из фактического размера помещения.
- Высота подъема. Промышленные подъемники поднимают груз на высоту 6-18 метров. Для частного применения, можно остановиться на минимальном варианте. Например, если речь идет о простом тельфере для трактора или легкового авто, достаточно высоты подъема в 1.5 метра.
- Напряжение. Электрооборудование работает от трехфазной сети в 380В. Если предполагается установка грузоподъемного устройства с ручным приводом, этот параметр неактуален.
- Диапазон рабочих температур. Заводские модели корректно работают при температуре -20/+40 градусов. Этот параметр нужно учитывать при выборе комплектующих деталей.
Как сделать и установить самому
Осуществить монтаж автокрана можно самостоятельно. Он устанавливается на транспортное средство. Для этого нужно снять кузов с шасси, чтобы поменять подрамник, т.к. заводская конструкция слаба и может треснуть. Подрамник надо сделать своими руками потому, что прикреплять крановую установку напрямую к раме запрещено.

Его можно сварить из наружного (18 мм) и внутреннего швеллеров. Планки сгибаются так, чтобы они повторяли форму рамы. Меньшая рейка вставляется в больший швеллер, чтобы образовался прямоугольник. К сваренной раме крепятся готовые швеллера. Между ними и базой ложится пожарный шланг для выравнивания плоскости планок и рамы.
Устанавливается на подрамник кран, в состав которого входят:
- балка;
- стрела;
- опорные стойки;
- специальные стремянки.
С помощью специальных стремянок закрепляется установка. Необходимо в стремянки вдеть распорки, изготовить которые можно так.
Когда появилось множество вариантов КМУ, монтируемых на шасси грузовиков Газель, владельцы данных авто стали думать, как поставить этот мобильный кран на свое транспортное средство. Ведь в итоге можно получить самую популярную спецтехнику. может иметь грузоподъемность от 1 до 11 тонн.
В первую очередь вам надо будет сдвинуть кузов машины назад. Так за ее кабиной появится свободное место для установки автокрана. Лучшее решение – вообще снять кузов с шасси, потому как надо будет поменять подрамник. Это нужно сделать по двум причинам:
- заводская конструкция слишком слабая, ибо сделана из тонкого металла, и может треснуть;
- стандартная Газель имеет слишком короткую базу, для установки КМУ ее надо удлинить.
Сборка в общих чертах

Теперь приступаем непосредственно к созданию руки-манипулятора. Начинаем с основания. Необходимо обеспечить возможность поворота устройства во все стороны. Хорошим решением будет его размещение на дисковой платформе, которая приводится во вращение с помощью одного мотора. Чтобы она могла вращаться в обе стороны, существует два варианта:
- Установка двух двигателей. Каждый из них будет отвечать за поворот в конкретную сторону. Когда один работает, второй пребывает в состоянии покоя.
- Установка одного двигателя со схемой, которая сможет заставить его крутится в обе стороны.
Какой из предложенных вариантов выбрать, зависит исключительно от вас. Далее делается основная конструкция. Для комфорта работы необходимо два «сустава». Прикреплённый к платформе должен уметь наклоняться в разные стороны, что решается с помощью двигателей, размещённых в его основании. Ещё один или пару следует разместить в месте локтевого изгиба, чтобы часть захвата можно было перемещать по горизонтальной и вертикальной линии системы координат. Далее, при желании получить максимальные возможности, можно установить ещё двигатель в месте запястья. Далее наиболее необходимое, без чего не представляется рука-манипулятор. Своими руками предстоит сделать само устройство захвата. Тут существует множество вариантов реализации. Можно дать наводку по двум самым популярным:
- Используется только два пальца, которые одновременно сжимают и разжимают объект захвата. Является самой простой реализацией, которая, правда, обычно не может похвастаться значительной грузоподъёмностью.
- Создаётся прототип человеческой руки. Тут для всех пальцев может использоваться один двигатель, с помощью которого будет осуществляться сгиб/разгиб. Но можно сделать и конструкцию сложней. Так, можно к каждому пальцу подсоединить по двигателю и управлять ими отдельно.
Далее остаётся сделать пульт, с помощью которого будет оказываться влияние на отдельные двигатели и темпы их работы. И можно приступать к экспериментам, используя робот-манипулятор, своими руками сделанный.
Какие меры безопасности должны соблюдаться при выполнении работ по установке КМУ?
Чтобы кран не перемещался по отношению к плоскости рамы, к подрамнику сзади и спереди должны быть приварены уголки размером 40 либо 50 мм, обеспечивающие прочную фиксацию установки. В момент крепления кузова к подрамнику между кузовом и КМУ следует оставить зазор около 200 мм. С помощью болтов к подрамнику производится крепление поперечин кузова. После этого для работы манипулятора должен быть подключён гидравлический насос.
Установка крана на грузовой автомобиль достаточно сложная работа, требующая большой ответственности. Поэтому при невозможности выполнения её самостоятельно лучше воспользоваться готовыми услугами крана-манипулятора
, предлагаемыми нашей фирмой. В таком случае будет гарантировано профессиональное выполнение работ, что позволит избежать таких проблем, как ремонт рамы в результате образования в ней трещины.
Кран-манипулятор — это силовая установка, монтируемая на подвижные платформы. Она поднимает и переносит тяжелые грузы за короткий промежуток времени. Такое оборудование можно сделать самостоятельно и установить самодельный кран в кузов грузовика.
Шаг 10. Схема подключения
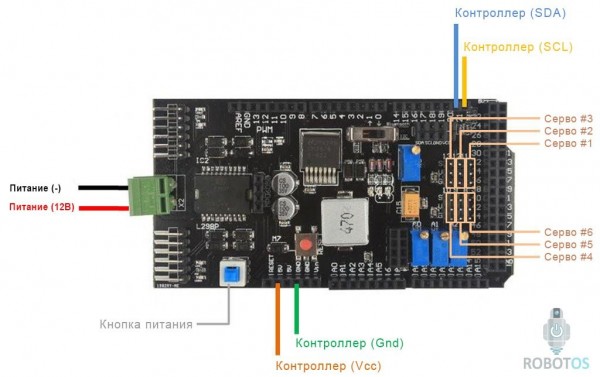
Как только Вы соберёте манипулятор, и подготовите разъем Nunchuk, Вы будете готовы что бы собрать электросхему. Мы использовали щит платы управления, который был в комплекте вместе с комплектом манипулятора. Это упрощает подключение компонентов, поскольку в нем уже имеются специальные разъемы для сервомоторов, источника питания и т. д.
Подключите компоненты следующим образом:
Контроллер:
- Контроллер контакт 6 (SCL) => Arduino Mega Контакт 21 (SCL) (на плате)
- Контроллер контакт 1 (SDA) => Arduino Mega Контакт 20 (SDA) (на плате)
- Контроллер контакт 3 (Vcc) => Ardino Mega Контакт 3V3 (на плате)
- Контроллер контакт 4 (Gnd) => Arduino Mega Контакт Gnd (на плате)
Если вы используете Arduino Uno, контакты Nunchuk SCL и SDA должны быть подключены к контактам Arduino следующим образом:
- Контроллер контакт 6 (SCL) => Arduino Uno контакт A5
- Контроллер контакт 1 (SDA) => Arduino Uno контакт A4
- Контроллер контакт 3 (Vcc) => Ardino Uno контакт 3V3
- Контроллер контакт 4 (Gnd) => Arduino Uno контакт Gnd
Сервопривод:
- Контакт Платы управления 11 => Сервопривод № 1
- Контакт Платы управления 12 => Сервопривод №2
- Контакт Платы управления 13 => Сервопривод № 3
- Контакт Платы управления 8 => Сервопривод № 4
- Контакт Платы управления 9 => Сервопривод №5
- Контакт Платы управления 10 => Сервопривод №6
Если вы не используете плату управления, Вы должны использовать следующую конфигурацию контактов:
- Arduino Контакт 11 => Серво #1 (Sgn)
- Arduino Контакт 12 => Серво #2 (Sgn)
- Arduino Контакт 13 => Серво #3 (Sgn)
- Arduino Контакт 8 => Серво #4 (Sgn)
- Arduino Контакт 9 => Серво #5 (Sgn)
- Arduino Контакт 10 => Серво #6 (Sgn)
- Arduino Контакт Gnd => Серво Gnd
- 6В Контакт питания => Серво Vcc
Вам также необходимо подключить внешний источник питания 12 В. Мы предлогаем использовать один блок с выходом более 2A. Сервоприводы потребляют много энергии, и если блок питания недостаточно мощный, сервоприводы будут вибрировать и перегреваться. Они также потеряют свою мощность.
Не подключайте источник питания до тех пор, пока Вы не загрузите код Arduino (см. Дальнейшие шаги). На плате есть кнопка питания. Держите её в выключенном положении.
Подключите USB-кабель к Arduino и перейдите к следующему шагу.
Сборка конструкции
Подготовьте:
- канат;
- шайбы;
- уголки и швеллеры;
- трубу;
- болгарку;
- сварочный аппарат.

Раму следует выполнить из стального уголка 63х63х5 мм. Стрелу длиной 5 м выполняют из трубы, имеющей диаметр 55 мм. Чтобы усилить агрегат, применяют уголки размерами 30х30х3 мм.
Грузоподъемность такого самодельного крана будет около 150 кг. Если необходимо поднимать панели с большей массой, то надо увеличить кратность полиспастов, которые являются устройством для поднятия груза. Полиспаст изготавливают из блоков, соединяют их друг с другом тросом. Этот трос должен обматывать блоки по кругу. Полиспаст позволяет поднять панели, прилагая при этом меньшую силу, чем вес груза.
Полиспаст выигрывает в силе в 3-4 раза. При этом учитывают потери на трение, которые составляют 10%. Чем больше будет выигрыш в силе, тем меньше расстояние, на которое инструмент может перенести панели.
Еще 2 дня нужны на сборку механизма. Схема подъема выполнена в виде 2-кратного полиспаста. Узел поворота стрелы представляет собой 6-кратный полиспаст. Поворотную платформу изготавливают путем крепления 2 шайб. Ось заменяет болт на 30 мм.

Для уменьшения величины противовесов опорные ноги делают длиной 2 м. При радиусе поворота шайбы в 200 мм и расстоянии 2 м до противовеса в 100 кг на болт будет действовать нагрузка 1 т. Это учитывают при расчете конструкции инструмента. Выполняют расчет на устойчивость.
Принимают конструкцию за единую систему на одной опоре. Она является наименьшим расстоянием от оси вращения. На систему действуют: вес груза, противовеса и крана. Подъемный барабан создают из трубы сечением 100 мм. Его нельзя устанавливать близко к блокам. Его фиксируют ближе к шайбам.
Блоки изготавливают из 3 шайб. Они должны огибаться шнуром, диаметр блоков должен быть большим, чтобы канаты не вылетели из шайб. Блоки фиксируют без подшипников.
Нужен гибкий трос сечением 5 мм. Его рабочая нагрузка равна 150 кг, а разрывающая — 850 кг. Полиспаст функционирует по принципу рычага. Для полиспаста основным показателем является его кратность (отношение всех ветвей троса к отходящим от барабана).
Если у шнура 6 частей, то тянущая сила на барабане будет в 6 раз меньше веса груза. Если канат изготовлен для поднятия 100 кг груза, то свернутый в 6 раз, он поднимет груз весом 600 кг. Когда все системы будут готовы, нужно собрать их, согласно составленной схеме конструкции, учитывая все размеры и правила крепления узлов и деталей. После сборки нужно смазать все системы конструкции и отдельные ее детали лизолом.
Следуя всем вышеописанным указаниям, можно самостоятельно изготовить подъемный кран для строительства дома и каких-либо подсобных помещений, используемых в хозяйстве. Перед началом эксплуатации следует проверить работоспособность всех узлов созданной конструкции подъемного крана. Потом провести проверочное испытание оборудования на возможность подъема и перемещения грузов.









 Adblock
Adblock