Кинематический анализ и силовой расчет кривошипно-ползунного механизма
Содержание:
- Устройство и принцип действия одинарного механизма смыкания
- Требования безопасности
- Качественные показатели рычажных механизмов
- Шарнирно-рычажные механизмы
- 4.1 Линейные и угловые скорости точек механизма
- Структурная схема механизма
- Как рассчитать простой рычажный механизм самостоятельно?
- Геометрический анализ механизма
Устройство и принцип действия одинарного механизма смыкания
Подобный агрегат представлен сочетанием нескольких конструктивных элементов, за счет которых обеспечивается передача и увеличение усилия. Основными деталями можно назвать:
- Две неподвижные траверсы. Их соединение проводится при помощи цилиндрической колонны.
- Крепление проводится при помощи гаек и контргаек, которые существенно повышают прочность конструкции.
- Передача усилия осуществляется за счет гидравлического цилиндра. Его крепление проводится при помощи шарниров.
- Также есть серьги.
Принцип действия механизма достаточно сложный. Характеризуется он следующим образом:
- Смещение поршня вниз в гидравлическом блоке происходит выпрямление серьги, она совмещается с горизонтальной осью.
- В результате совмещения осей происходит соединение шарниров.
- Шарниры монтируются так, чтобы при контакте расстояние между ними было меньше, чем суммарная длина обеих серег.
- Выпрямление серег происходит за счет распорного усилия.

Приведенная выше информация определяет то, что главным недостатком конструкции становятся нескомпенсированные боковые усилия, которая возникают из-за нагрузки втулок и колонн. Именно поэтому рекомендуется использовать подобный вариант исполнения только в случае передачи небольшого усилия.
Требования безопасности
При проектировании и монтаже рычажного механизма учитываются требований безопасности. Они во многом зависят от области применения устройства, а также особенностей самого механизма.

Среди особенностей этого момента можно отметить следующее:
- При изготовлении должен подбираться материал, который будет соответствовать всем требованиям. Примером можно назвать высокую коррозионную стойкость. При проектировании указывается то, какой именно материал должен применяться при изготовлении устройства. Часто отдается предпочтение углеродистой стали и легированным сплавам. Некоторые элементы могут быть изготовлены из уплотнительных и других материалов, все зависит то конкретного случая.
- При проектировании учитывается то, каким образом происходит перераспределение нагрузки. Это связано с тем, что в некоторых местах она будет критической.
- Под активным элементом при подъеме тяжелых объектов не должно находится людей, другого оборудования, а также частей самого рычажного механизма. Это связано с высокой вероятностью падения переносимого груза.
- Перед непосредственным применением оборудования следует проводить визуальный осмотр, который позволяет определить наличие или отсутствие повреждений. Кроме этого, должно проводится периодическое обслуживание. Даже незначительный дефект может стать причиной существенного снижения прочности рычажного механизма. Периодическое обслуживание позволяет существенно продлить срок службы устройства.
- Запрещается применять механизм не по предназначению. Перед каждым его использованием проверяется надежность крепления. Нагрузка должна оказываться на конструкцию соответствующим образом, так как в противном случае происходит неправильное перераспределение силы. Именно поэтому при проектировании указывается то, каким образом устройство должно устанавливаться и как использоваться.
- При применении учитывается то, на какую максимальную нагрузку рассчитано оборудование. Слишком высокий показатель может стать причиной, по которой происходит повреждение основных элементов. При проектировании учитывается то, какая нагрузка может оказываться на конструкцию.
Как правило, соответствующее руководство по применению устройства составляется непосредственно на месте его эксплуатации в соответствии с установленными нормами. Это связано с тем, что рычажные механизмы получили весьма широкое распространение, могут устанавливаться в качестве составного узла другого оборудования.
При этом узел оборудован тремя важными независимыми системами:
- Гидравлическая. Эта часть устанавливается в большинстве случаев для передачи усилия. Гидравлика получила весьма широкое распространение, так как она предназначена для непосредственной передачи усилия. Гидравлическая часть основана на подаче специальной жидкости, при помощи которой проводится передача усилия. Гидравлика несет с собой опасность по причине того, что подвижный элементы могут передавать усилие. Поэтому все основные элементы должны быть защищены от воздействия окружающей среды, для чего проводится установка различных кожухов.
- Механическая. Механика отвечает за непосредственную передачу усилия и достижения других целей. Неправильная работа устройства может стать причиной повреждения и деформации. Механика также защищается специальными кожухами, так как попадание посторонних элементов запрещается.
- Электрическая. Для управления механизмом проводится установка электрической части. Она должна быть защищена от воздействия окружающей среды, так как даже незначительное механическое воздействие может стать причиной повреждения магистрали электроснабжения.
Опасность с собой несет и электрическая часть, которая состоит из конечных выключателей. Схема подключения предусматривает использование как минимум двух выключателей, устройство должно обесточиваться в случае выхода из строя одного из них.
Механическая система защиты действует путем прерывания подачи масла в гидравлический цилиндр. При этом проводится слив масла с цилиндра в общую емкость. Подобная система срабатывает даже при незначительном повреждении устройства.
Качественные показатели рычажных механизмов
Для формирования общего описания устройства применяются различные качественные показатели, которые могут касаться самых различных моментов. Наиболее распространенными можно назвать:
- КПД считается наиболее важным параметром, который рассматривается при создании самых различных механизмов. Эта безразмерная величина определяет количество энергии, которая применяется для достижения поставленных целей с учетом потерь. Стоит учитывать тот момент, что подобный показатель рычажного механизма находится всегда меньше единицы, то есть при работе возникают потери. При приближении значения КПД к единице существенно снижаются потери, а также повышается качество рычажного механизма. Провести расчет рассматриваемого показателя достаточно сложно, так как для этого требуются самые различные формулы.
- Ход механизма также учитывается при проектировании подходящего устройства. Ход определяется начальной и конечной точкой. При этом стоит учитывать, что в некоторых случаях провести расчеты достаточно сложно, так как траектория движения может быть криволинейной.
- Угол размаха коромысла измеряется путем вычитания двух крайних точек положения на момент работы. В большинстве случаев устройство совершает повторяющееся цикличное движение.
- Коэффициент, отражающий неравномерность распределения средней скорости. Этот показатель определяется соотношением времени холостого хода к рабочему. Провести соответствующие расчеты можно только при применении формул, а также построении чертежа.
- Угол давления и передачи. Подобный параметр представлен соотношением острого угла между векторной активной силы, которая действует на предшествующем звене.
Каждый параметр рассматриваемые в отдельности, после чего составляется оценочный анализ, отражающий общее состояние механизма.
Шарнирно-рычажные механизмы
Подобный тип механизма также получил весьма широкое распространение. При этом за его длительный срок эксплуатации было изобретено несколько вариантов исполнения, которые характеризуются своими определенными свойствами. Выделяют следующие виды шарнирно рычажных механизмов:
- С двумя кривошипами.
- Кривошипно-коромысловые.
- Двух коромысловые.
Примером использования варианта исполнения с двумя кривошипами можно назвать перенос тяжелой заготовки с тележки на обрабатывающий станок. Его конструкция характеризуется следующими особенностями:
- В качестве основы применяется две четырехлучевые звездочки, которые фиксируются на валу.
- Также фиксация осуществляется за счет шарнирного соединения с осью и четырьма ложементами. На момент воздействия усилия они создают двухкривошпный механизм, который принимает часть нагрузки.
- Валы фиксируются на подшипниках скольжения, которые расположены в корпусе. При помощи кронштейна они устанавливаются на общей раме, принимающую основную нагрузку.

Именно конструктивные особенности во многом определяют то, где и каким образом может применяться устройство.
4.1 Линейные и угловые скорости точек механизма
Найдем линейные скорости точек звеньев для 12-ти положений
механизма:
Рассмотрим ведущее звено (Рисунок 10) механизма:

Рисунок 10
Угловую скорость первого звена
найдём по формуле:
,
где –
частота вращения первого звена.
.
При вращательном движении
первого звена скорость точки А этого звена направлена перпендикулярно её
радиусу вращения по направлению и равна:
,
Согласно определению
плоскопараллельного движения, скорость любой точки этого тела будет
определяться через скорость полюса следующим образом:
,
,
где –
скорость точки А;
– скорость
точки О, взятой за полюс;
–
скорость вращения точки А вокруг точки О.
Зададим масштабный коэффициент
скоростей :
,
где –
значение скорости вращения точки А вокруг точки О;
– длина
отрезка на плане скоростей, представляющая
скорость на плане скоростей.
Выбираем в качестве полюса плана
скоростей произвольную точку p, проводим в
выбранном масштабе вектор .
Для нахождения скорости точки В
рассмотрим движение второго звена, взяв за полюс точку А и рассмотрим
движение четвертого звена, взяв за полюс точку О1.
Тогда будем иметь:
,
,
где –
неизвестная скорость точки В;
–
известная по величине и направлению скорость точки А;
–
скорость точки В при её вращении вокруг точки А, направленная
перпендикулярно АВ .
– скорость
точки В при её вращении вокруг точки О1, направленная
перпендикулярно О1В .
Построим план скорости для седьмого положения механизма.
Решим графически векторное равенство и найдём величины и .
Измерив длины отрезков pb и ab
и умножив их на масштабный коэффициент скоростей, в котором строится план
скоростей, получим истинные значения .и .
,
.
Отрезок, изображающий вектор
скорости точки , найдем, воспользовавшись
теоремой подобия:
откуда
где – длина
отрезка ac на плане
скоростей;
– длина
отрезка ab на плане
скоростей;
– истинная
длина отрезка AС;
–
истинная длина второго звена AB
Замерив на плане скоростей
длину отрезка и подставив найденноезначение
в выражение, получим:

Отложим полученный отрезок ac на плане скоростей и соединив
точку p с точкой c получим отрезок pc
изображающий в масштабе скорость точки С,
то есть:
.
Определим скорость точки D, для этого составим векторное равенство:
,
,
где –
неизвестная скорость точки D;
–
известная скорость точки C;
–
скорость точки D при её вращении вокруг точки C, направленная перпендикулярно DC .
Решим графически векторное
равенство и найдём величины и .
Измерив длины отрезков pd и cd и умножив их на масштабный коэффициент скоростей, в
котором строится план скоростей, получим истинные значения и .
,
.
Определим угловые скорости , и звеньев 2, 3 и 4. Величины этих скоростей
определяются из равенств:
,
.
Угловые скорости , и направлены
в ту же сторону, куда и скорости , и .
Мы нашли значения и направления
линейных , , , , и угловых , , скоростей
для седьмого положения механизма.
Строим планы скоростей для оставшихся положений механизма.
Вычисляем истинные величины линейных и угловых скоростей для всех положений
механизма и сводим их в таблицу .
Таблица
3 – Угловые и линейные скорости для двенадцати положений механизма
|
Номер положения механизма |
Скорости точек, |
Угловые скорости звеньев, |
|||||||
|
1,5 |
0,69 |
1,62 |
0,81 |
0,12 |
0,81 |
2,31 |
2,31 |
1,72 |
|
|
1 |
1,5 |
0,12 |
1,8 |
0,42 |
0,39 |
0,21 |
2,57 |
0,6 |
0,3 |
|
2 |
1,5 |
0,78 |
1,53 |
0,9 |
0,69 |
0,48 |
2,18 |
1,37 |
1,95 |
|
3 |
1,5 |
1,56 |
0,87 |
1,59 |
1,23 |
1,23 |
1,24 |
3,51 |
1,4 |
|
4 |
1,5 |
1,77 |
0,3 |
1,77 |
0,87 |
1,62 |
0,43 |
4,63 |
4,42 |
|
5 |
1,5 |
1,74 |
0,54 |
1,74 |
1,05 |
1,8 |
0,77 |
5,14 |
4,35 |
|
6 |
1,5 |
1,26 |
0,87 |
1,38 |
0,72 |
1,74 |
1,24 |
4,97 |
3,15 |
|
7 |
1,5 |
1,8 |
0,39 |
0,12 |
0,33 |
2,57 |
0,94 |
||
|
8 |
1,5 |
1,41 |
2,28 |
1,2 |
1,29 |
1,44 |
3,25 |
4,11 |
3,52 |
|
9 |
1,5 |
1,89 |
1,53 |
1,74 |
0,9 |
1,65 |
2,18 |
4,71 |
4,72 |
|
10 |
1,5 |
1,92 |
0,3 |
1,89 |
1,29 |
1,8 |
0,43 |
5,14 |
4,8 |
|
11 |
1,5 |
1,35 |
1,02 |
1,44 |
0,78 |
1,35 |
1,45 |
3,85 |
3,37 |
Структурная схема механизма

Рис. 1.2.
Для определения величины коэффициента проанализируем структурную схему
механизма (рисунок 1.2). Структурная схема механизма состоит из шести звеньев:
Таблица 1.3
|
№ звена, названия звена |
Схема |
Вид движения |
|
0, стойкарисунок |
неподвижное |
|
|
1, кривошип |
вращательное |
|
|
2, шатун |
сложное |
|
|
3, ползун |
поступательное |
|
|
4, шатун |
сложное |
|
|
5, ползун |
поступательное |
Из анализа данных таблицы 2.2.
следует, что звенья 1,2,3,4,5 — подвижны, а стойка 0- является не подвижной
звеном. Следовательно, n=5
Для определения коэффициентов и найдем
все кинематические пары, входящие в состав рассматриваемой кинематической цепи.
Результаты исследований заносим в Таблицу 1.4
Таблица 1.4
|
№ П/П |
Номера название |
Схема |
Класс/ подвижность |
Вид контакта/ замыкание |
|
|
1 |
0-1/ вращательная |
5/1 |
Поверхность «низшая» геометрическая |
||
|
2 |
1-2/ вращательная |
5/1 |
Поверхность «низшая» геометрическая |
||
|
3 |
2-3/ поступаетльная |
5/1 |
Поверхность «низшая» геометрическая |
||
|
4 |
1-4/ вращательная |
5/1 |
Поверхность «низшая» геометрическая |
||
|
5 |
4-5/ поступательная |
5/1 |
Поверхность «низшая» геометрическая |
||
|
6 |
3-0/ поступательная |
5/1 |
Поверхность «низшая» геометрическая |
||
|
7 |
5-0/ поступательная |
5/1 |
Поверхность «низшая» геометрическая |
||
Из анализа данных таблицы 2.2 следует что, схема исследуемого механизма представляет собой замкнутую
кинематическую цепь, звенья которой образуют между собой семь
пар пятого класса, следовательно, =7, и не одной парой четвертого
класса =0
W = 3n
−2–
,
n – число подвижных
звеньев; — число пар пятого класса; — число пар четвертого класса.
W =3*5-2*7-0=15-14=1
Результат означает, что для однозначного описания
взаимного расположения звеньев механизма данного вида на плоскости достаточно 1
обобщенной координаты.
Состав
структуры исследуемого механизма согласно
принципу построения механизмов по Ассуру.
Разобьем механизм на структурные группы Ассура, в
порядке, обратном образованию механизма, начиная с выходного звена.
Группа звеньев 4-5 состоит из шатуна 4 и ползуна 5,
и трех кинематических пар пятого класса: 1-4- вращательной пары и 0-5,4-5 —
поступательной пары.
Тогда
коэффициенты формулы Чебышева принимают следующие значения: n = 2; = 3, = 0.
W=
3n-2-
=3*2-2*3-0=0
Следовательно,
группа звеньев 4 —
5 является группой
2 класса (так как состоит из двух звеньев и трёх пар), второго вида (так как
две пары вращательные и одна поступательная) и второго
типа (так как два свободных конца, которыми эта группа присоединяется к
механизму).
Группа звеньев 2-3 состоит из шатуна 2 и ползуна 3,
и трех кинематических пар пятого класса: 1-2- вращательной пары и 0-3, 2-3 —
поступательных пар.

Тогда
коэффициенты формулы Чебышева принимают следующие значения: n = 2; = 3, = 0.
W=
3n-2-
=3*2-3*3-0=0
Следовательно,
группа звеньев 2 —
3 является группой
2 класса (так как состоит из двух звеньев и трёх пар), второго вида (так как
две пары вращательные и одна поступательная) и второго
типа (так как два свободных конца, которыми эта группа присоединяется к
механизму).
Группа звеньев 0-1 состоит из 0- стойки и
1-кривошипа, одна кинематическая пара пятого класса, 0 — 1 -вращательная пара,
следовательно, n=1, =1,=0.
W=
3n-2-
=3*1-2*1-0=1
Следовательно,
группа звеньев 0 — 1 не является структурной группой, а представляет собой
первичный механизм
Из
проведенного структурного анализа следует, что структура исследуемого механизма состоит из первичного
механизма с подвижностью, равной 1, и двумя структурными группами 2-го класса
2-го порядка 2-говида

Таким образом, данный
плоский рычажный механизм является механизмом 2 класса (класс механизма
определяется наивысшим классом группы Ассура,
входящей в данный механизм) с подвижностью равной 1.
Построение кинематической схемы
выполняется в выбранном масштабном коэффициенте. Для определения масштабного
коэффициента воспользуемся формулой:
µl
µl— масштабный
коэффициент длин
lАО— длина кривошипа,
м.
– отрезок, изображающий длину кривошипа в принятом
масштабном
Как рассчитать простой рычажный механизм самостоятельно?
Перед непосредственным созданием механизма следует провести расчеты основных показателей, а также построить схему распределения нагрузок. Силовой расчет рычажного механизма проводится после определения исходных данных:
- Создается кинематическая схема массы и моментов, инерции звеньев и положения центров массы.
- Учитывается закон движения механизма.
- Определяется внешнее силовое нагружение.
- Рассчитывается угол перекрытия рычажном механизме.
Проводимый кинематический и силовой предусматривает создание системы координат, которая используется для расчета кинематических характеристик. Кулисно-рычажный вариант исполнения проектируется при создании системы координат и обозначением всех сил. Для проектирования требуется большое количество различных формул, при этом в конце следует выполнить проверку.
Как правило, рассматриваемая работа выполняется инженерами, который учитывают ГОСТ проектирование. Это связано с тем, что структурная формула плоских рычагов выбирается в зависимости от области их применения.
Геометрический анализ механизма
Целью геометрического анализа
рычажного механизма является составление уравнений геометрического анализа,
решение их, выделение побочных и основных решений, определяющих положения
звеньев, а также исследование функций положения выходных звеньев структурных
групп.
2.1.
Групповые уравнения и их решение
1)
Уравнения геометрического анализа.
Здесь и далее все неизвестные,
которые необходимо определить из данной системы или из данного уравнения
подчёркнуты.
Функции положения для группы I (кривошип OA):
Групповые уравнение для группы II (ВПВ):
Функции положения точки K:
Функции положения точки D:

Групповые уравнение для группы III (ВВП):
2) Решение
уравнений геометрического анализа в общем виде
а) Группа ВПВ:
Перенесём все неизвестные части
влево, а известные – вправо:
Возведём обе части в квадрат:

Сложим два уравнения:


Отсюда легко можно найти и :
И следовательно, мы можем найти и
сам угол .
б) Группа ВВП:
Напомним, что:

Отсюда мы можем определить :
Тогда:
Здесь , то есть существуют два решения уравнения.
Этим решениям соответствуют два варианта сборки звеньев группы ВВП. На рис.2.4
один из них, соответствующий основному решению (-), показан сплошными линиями,
а другой, соответствующий побочному решению (+), изображен пунктирными линиями.
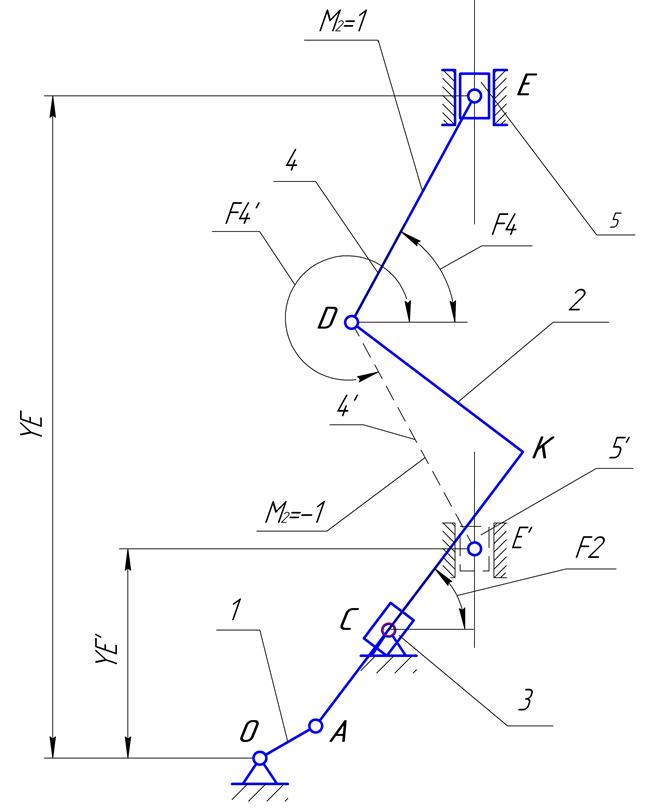
Рис.2.3. Две сборки
механизма
Положение
группы типа ВВП, при котором обход шарниров в последовательности E, D, K
происходит против часовой стрелки, соответствует способу сборки , если же обход идёт по часовой стрелки,
как в случае с E′DK,
то способ сборки .
В
исходной схеме .
Далее найдём :

Все расчёты представлены в
приложении в протоколе MathCad.
Из неравенства
можно получить условие существования
группы ВПВ:
, где
Из неравенства
несложно получить
условие существования группы ВВП:









 Adblock
Adblock